Calibration validation
MSA engineers validate Calibration Anywhere results during platform setup, remote service, and platform hardening.
Calibration Anywhere performs automatic self-validation when deployed on-prem or for online background operation.
Main Street Autonomy engineers validate calibration accuracy by examining various relationships described below. These and other other metrics that characterize the amount and type of motion, the amount, quality, range, and distribution of features, and metrics that relate observations in each sensor relative to other sensors are used for automatic self-validation.
Sensor fusion: colorized lidar point clouds

Lidar and camera sensor fusion - on-road autonomy
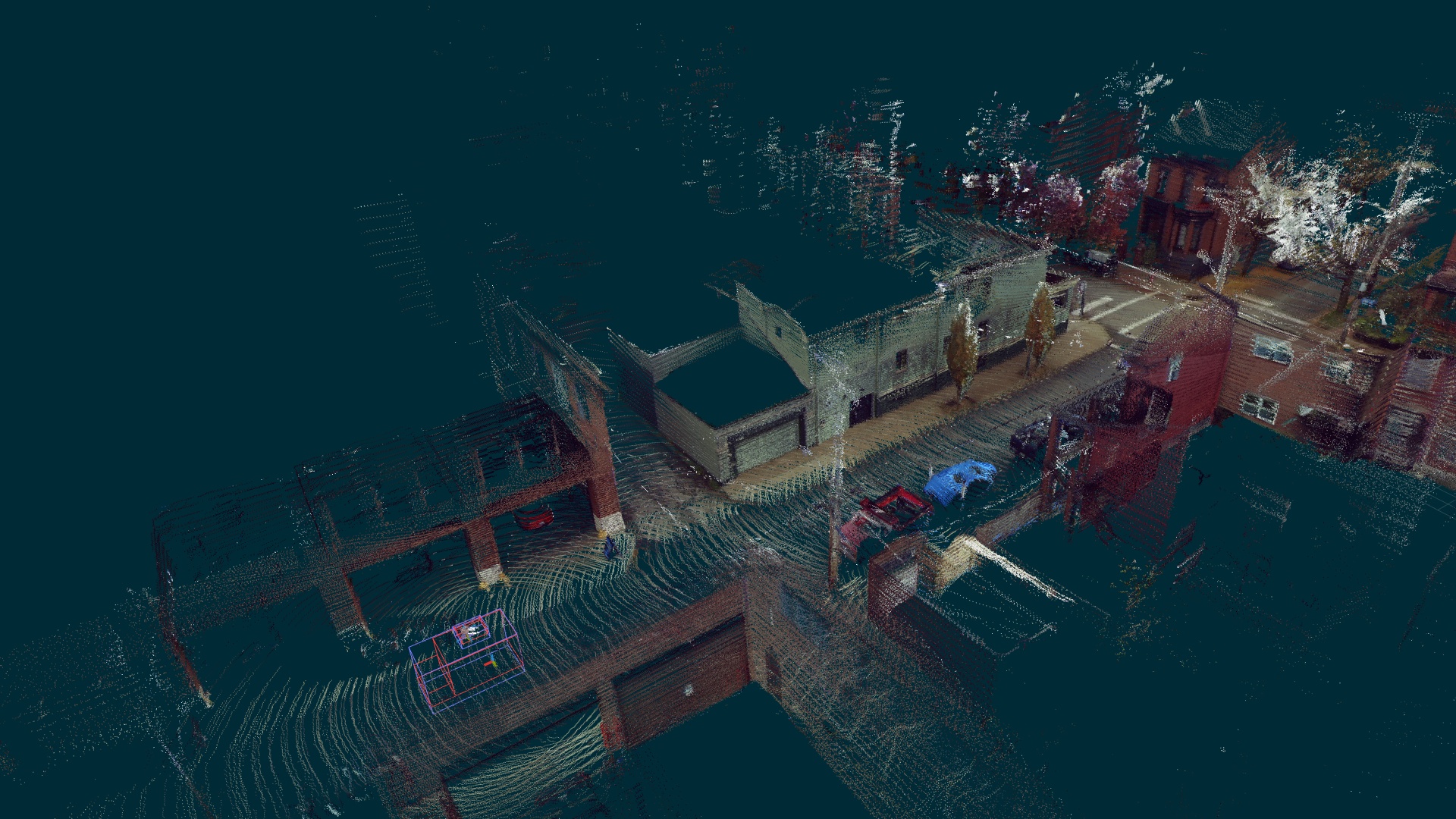
Lidar points are motion-compensated, time-compensated, and painted the appropriate pixel color from the cameras. Coherent appropriately-painted scenes demonstrate:
- correct camera -> lidar extrinsics
- correct camera -> camera extrinsics
- correct lidar -> lidar extrinsics
- correct camera -> lidar time offsets
- correct camera intrinsics
- correct camera readout time for rolling shutter cameras
Camera/lidar/radar alignment
Objects in the overlapping FOV of multi-modal sensors are evaluated to determine if they are similarly positioned in the world, which demonstrates:
- correct lidar -> lidar extrinsics
- correct radar -> radar extrinsics
- correct camera -> camera extrinsics
- correct camera -> lidar -> radar extrinsics
- correct camera intrinsics
- correct camera, lidar, and radar time offsets
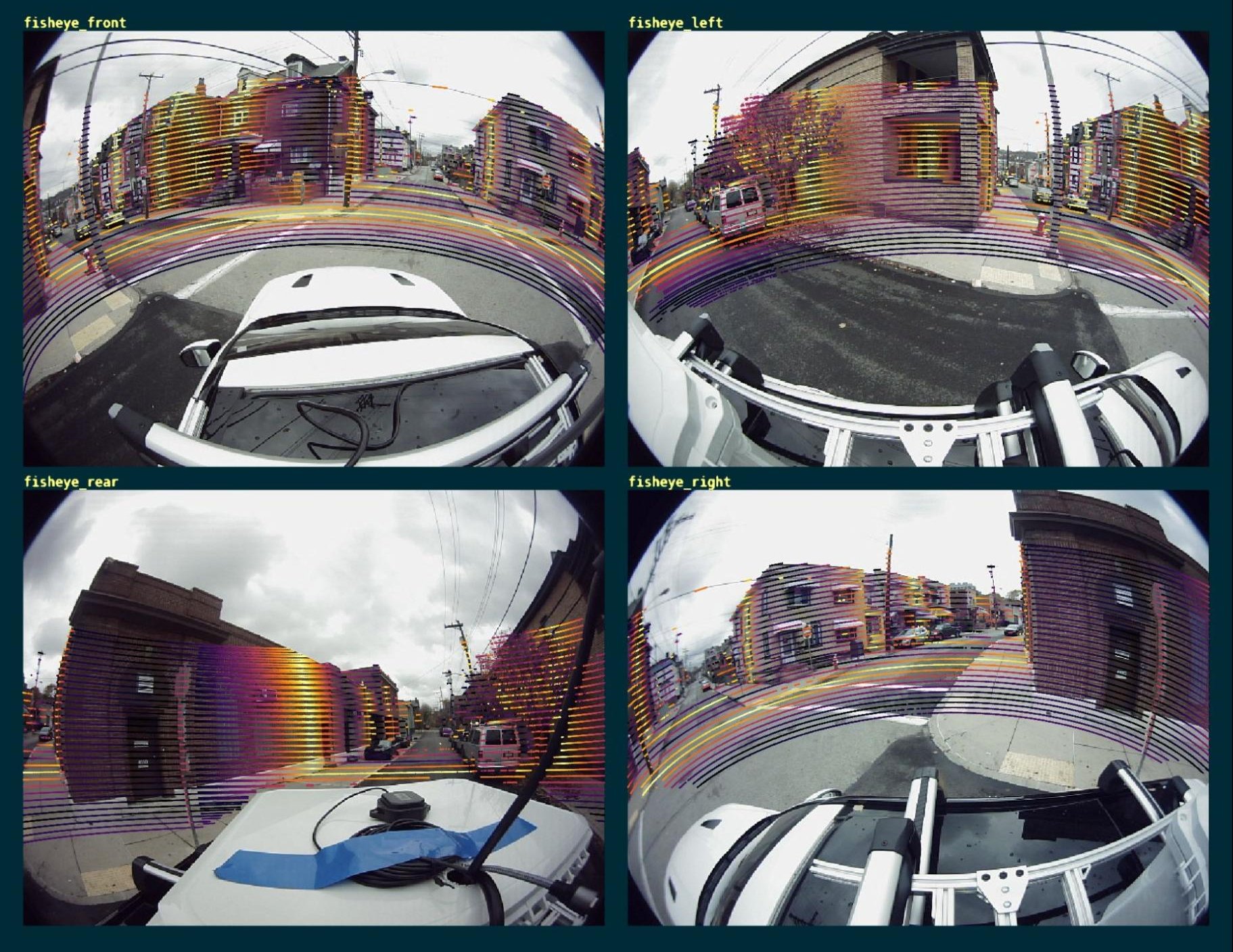
Localization, mapping, and feature tracking
This visualization shows features tracked in each camera, the corresponding map built from the features, and the robot trajectory overlaid onto the feature map, which demonstrates:
- calibration suitability for accurate localization, mapping, and feature detection
- correct camera -> lidar extrinsics
- correct camera -> camera extrinsics for overlapping cameras
- correct camera intrinsics
- correct camera -> lidar time offsets
- correct camera readout time for rolling shutter cameras
Rectified camera images show straight real-world edges

Camera images are evaluated to determine if real-world edges (like doors, windows, and sides of buildings) are straight in the rectified image, regardless of camera lens or configuration, which demonstrates:
- correct camera intrinsics
Epipolar line measurements (reprojection error)

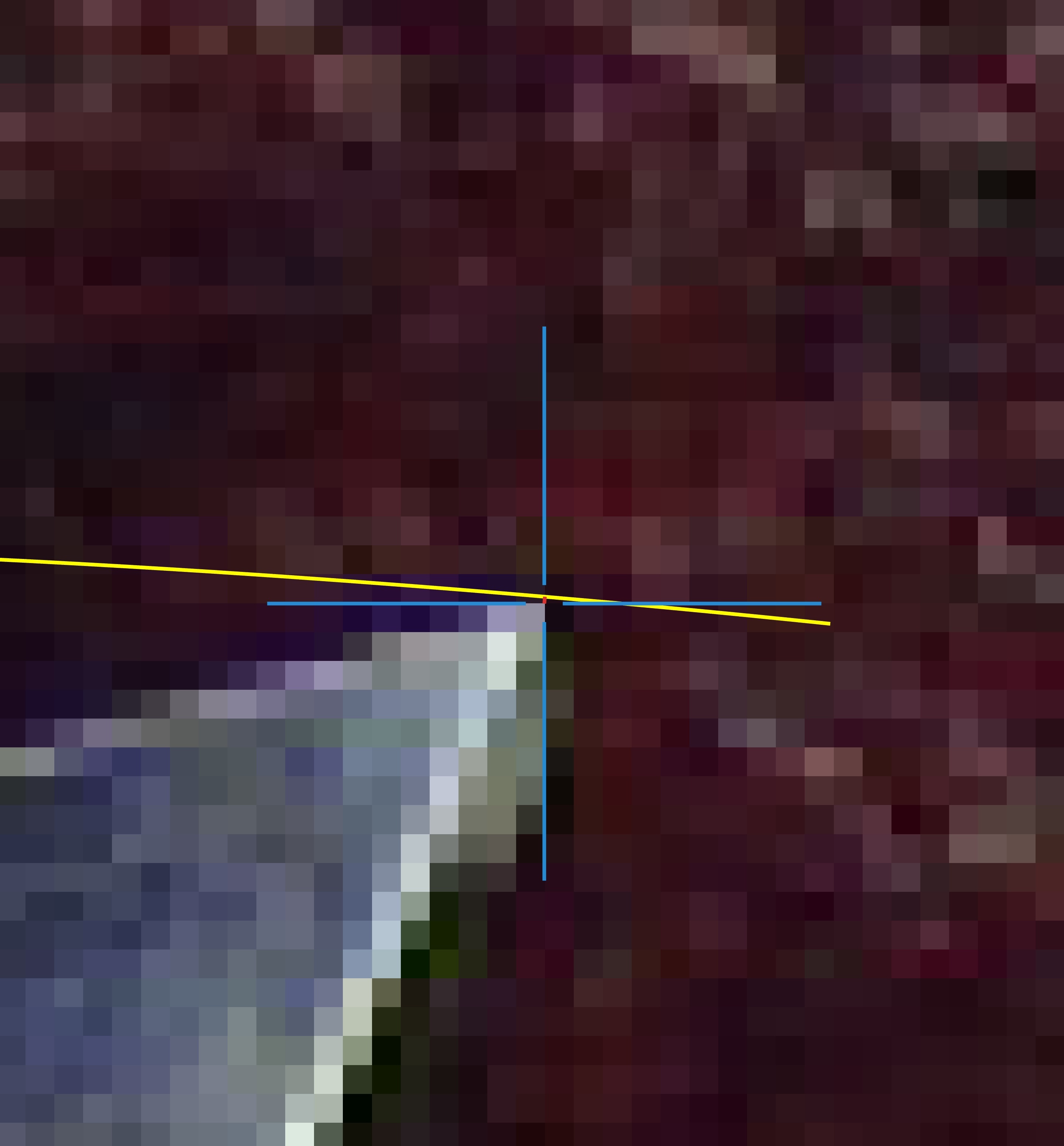
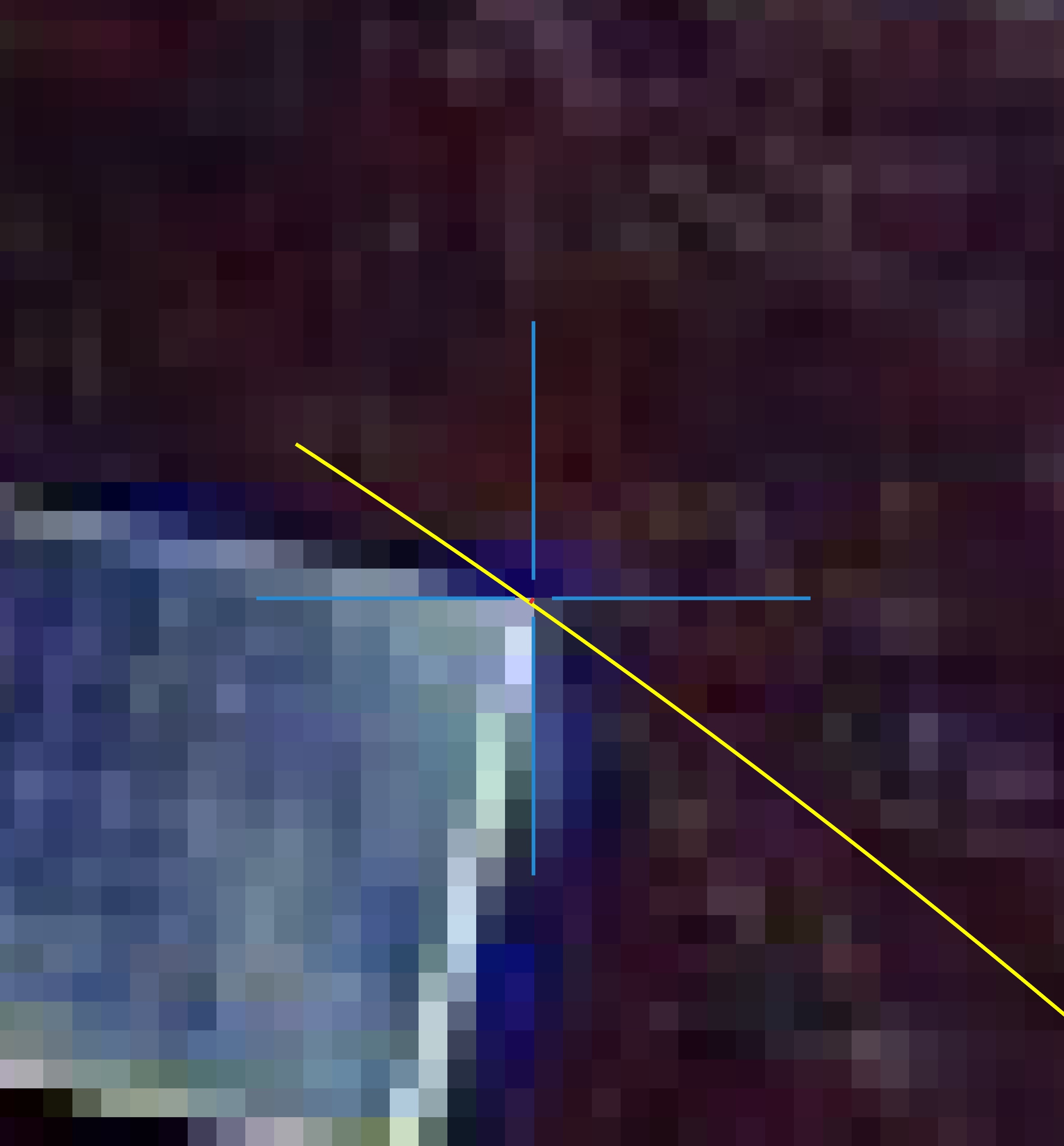
Reprojection error measures that a point in the world seen in multiple cameras has sub-pixel errors between detections in one camera and projections into another camera, which demonstrates:
- correct camera -> camera extrinsics
- correct camera intrinsics
Trajectory-implied gyro and acceleration vs. IMU measurements
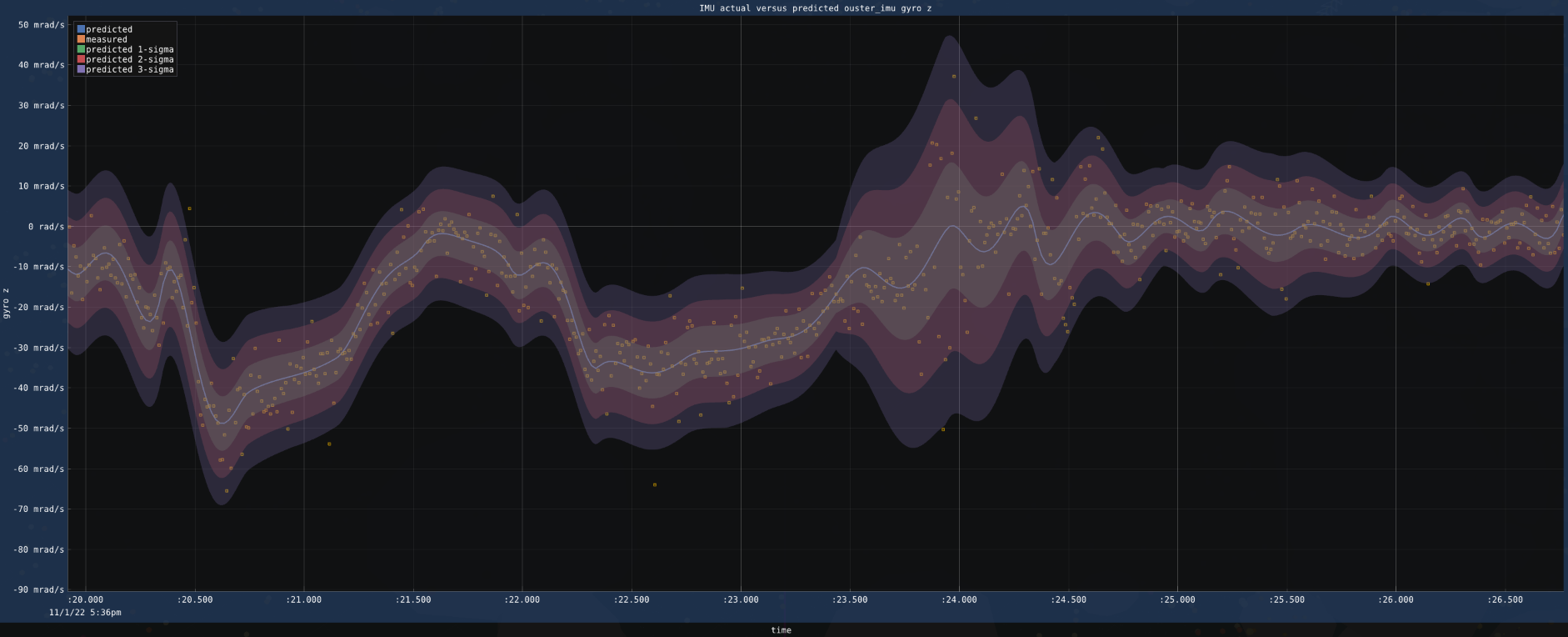
Minimal error between trajectory-implied estimates vs. IMU measurements demonstrates:
- correct odometry and trajectory estimation
- correct trajectory and IMU coregistration
- correct IMU orientation with vehicle
- correct IMU time offsets